Autonomous Warehouse Task Simulation & CV-Based Docking
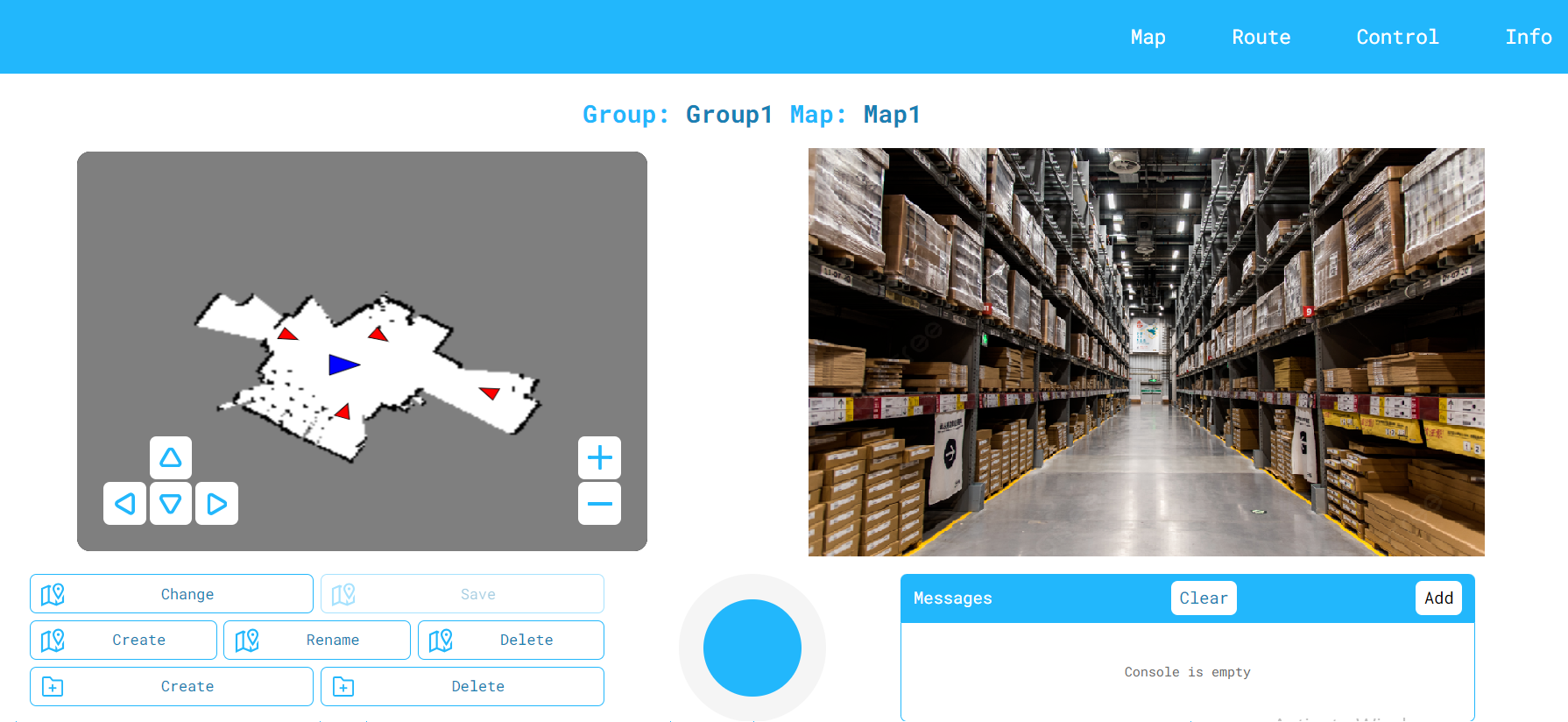
This applied robotics lesson focuses on simulating an AI-powered mobile robot performing logistics tasks in a warehouse environment. Students implement computer vision-based docking, waypoint navigation, and task execution using the ROS 2 framework and modern perception tools.
By combining vision, navigation, and behavioral planning, this lesson mirrors the systems used in real-world automated warehouses operated by companies like Amazon, DHL, and various robotics startups.
Technologies Covered
- AprilTag or ArUco marker detection using OpenCV
- Pose estimation and alignment logic for precision docking
- Task-based navigation using waypoints and behavior trees (BTs)
- Integrating computer vision feedback into ROS 2 control loops
System Overview
- Visual tags (AprilTag or ArUco) are placed on docking stations or loading areas.
- A camera onboard the robot detects the tags and estimates their relative pose (position and orientation).
- The robot uses this pose information to align and dock accurately for task execution (e.g., loading/unloading).
- Navigation goals are organized using waypoints or behavior trees for multi-step tasks.
- ROS 2 nodes process vision input and issue movement commands via the Nav2 stack or direct velocity control.
Learning Outcomes
- Detect and localize fiducial markers using OpenCV and ROS-compatible libraries
- Calculate pose transforms and apply them for autonomous docking
- Develop structured task flows using waypoints and behavior trees
- Integrate computer vision feedback into the robot’s navigation logic
- Simulate real warehouse automation workflows using ROS 2 and Gazebo
Optional Extensions
- Replace static markers with dynamic QR codes for multi-target environments
- Use a depth camera (e.g., RealSense or ZED) for obstacle-aware docking
- Integrate voice or GUI interfaces for assigning warehouse tasks
- Log task completions and docking metrics to a cloud-based dashboard
- Simulate multi-robot coordination and shared docking stations