ROS 2 Software Stack for Autonomous Navigation
This core software lesson guides students through building the "brain" of an autonomous mobile robot (AMR) using the ROS 2 framework. Students implement key autonomy modules such as localization, mapping, and path planning using open-source ROS 2 packages. The final result is a fully integrated navigation system capable of moving through unknown environments safely and intelligently.
Core Concepts
- Configuring and tuning the Navigation2 (Nav2) stack
- Implementing odometry, TF tree broadcasting, and localization with AMCL
- Performing mapping and SLAM using tools like
slam_toolboxorcartographer - Setting up sensor drivers (e.g., LIDAR, IMU, encoders) and robot model (URDF/Xacro)
- Developing and launching ROS 2 nodes in Python or C++
- Performing simulation testing in Gazebo and RViz
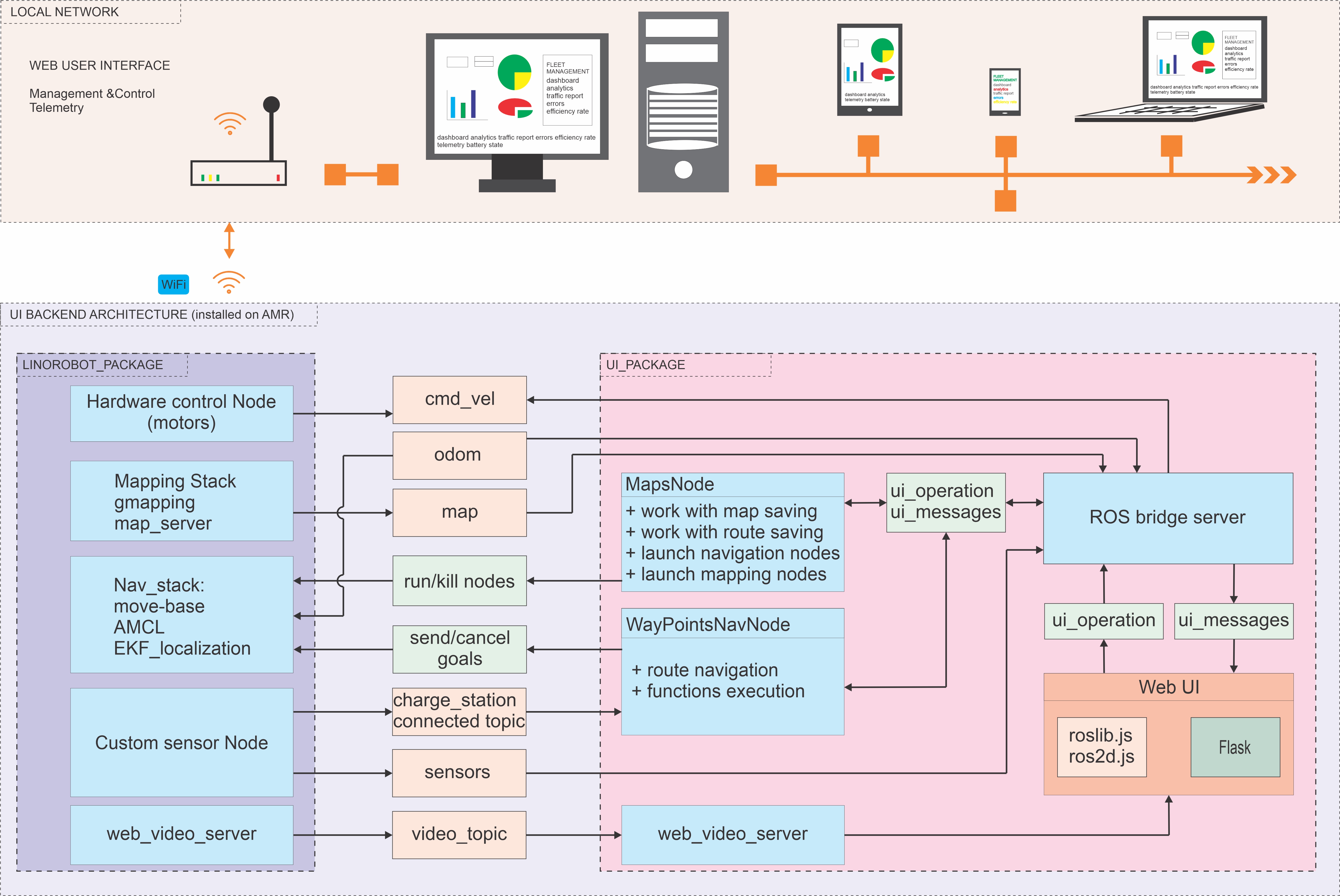
System Overview
- The robot’s physical model is described using URDF or Xacro, including joints, wheels, and sensors.
- Sensor drivers are launched to stream real-time data from LIDARs, IMUs, and wheel encoders.
- Odometry and TF frames are published, forming the basis of robot localization.
- The AMCL node is used for localization against a map, or SLAM is used for building maps dynamically.
- The Nav2 stack plans paths, avoids obstacles, and sends velocity commands to the base controller.
- Simulation and visualization are conducted using Gazebo and RViz, with testing routines and tuning cycles.
Learning Outcomes
- Set up and configure a modular ROS 2 software stack
- Develop and launch ROS 2 nodes in both Python and C++
- Build real-time localization and mapping pipelines
- Understand and manipulate the TF2 tree and ROS message types
- Integrate and test robot software in simulated environments
- Gain practical skills in the ROS 2 development workflow
Optional Extensions
- Replace AMCL with EKF-based localization using robot_localization package
- Use Nav2 Behavior Tree customization to define custom navigation logic
- Add multi-robot simulation scenarios in Gazebo
- Deploy and benchmark on a physical robot for real-world tuning
- Create a teleoperation or diagnostic GUI for remote mission support